
自动装卸货+堆垛码垛
机械臂自动装卸货是一种具有广泛应用前景的自动化操作,它通过视觉拍照识别和精确的编程和控制,使机械手臂能够准确高效地完成货物的装载和卸货工作。我们的优势:
1. 世界领先的并联机器人设计及系统研发能力,独立研发无人驾驶导航技术、精准定位及装卸技术。
2. 近二十年光学定位的仓储现场实战经验和智能装卸算法、光学传感器精准定位等核心技术实战积累。
3. 针对货物塑料膜包装、袋装、箱装、异型包装有独特的装卸方案,重点突破了物流行业的装卸货难题。
通过机械臂自动化装卸货,可以实现高效的货物搬运和码垛操作,提高生产效率,减少人工成本,同时还可以保证码垛的质量和稳定性。在工业自动化和物流运输领域,机械臂装卸货已经成为一种重要的应用技术。



复合搬运机器人
复合搬运机器人是一种结合了多项技术的机器人,它可以在不同的场景下进行多项任务,如搬运、上下料、码垛等。复合码垛机器人:这种机器人可以用于将不同形状和重量的化肥袋码放整齐,可以自动化完成化肥袋的搬运、堆叠、捆扎等操作。智能物流搬运机器人:可以用于自动化完成物流仓库内的搬运和运输任务,它可以自动化完成货物的取货、搬运和放货等操作。 具有多项技术和功能,可以根据不同的场景和任务需求进行定制化设计和生产。

无序抓取
人类的大部分行为都在为熵减而奋斗。具体到离散制造业,即使到自动化程度已经很高的今天,仍然摆脱
不了为“有序”而做出的大量投入。因为一条从毛坯到成品的自动化制造生产线仍然需要不少的“缓冲”,
以避免由于某个环节的故障导致全线停产的尴尬。换一种思路,在生产线上可以将产品横平竖直的摆放
整齐,但是生产过程对于精度的追求是无止境的,只要有[X,Y,Z,Rx,Ry,Rz]中任何一个值发生了变化,
对于工业机器人或者一个自动执行机构而言,仍然是“无序”的状态.因此,从无序到有序,是一个永恒的需求.
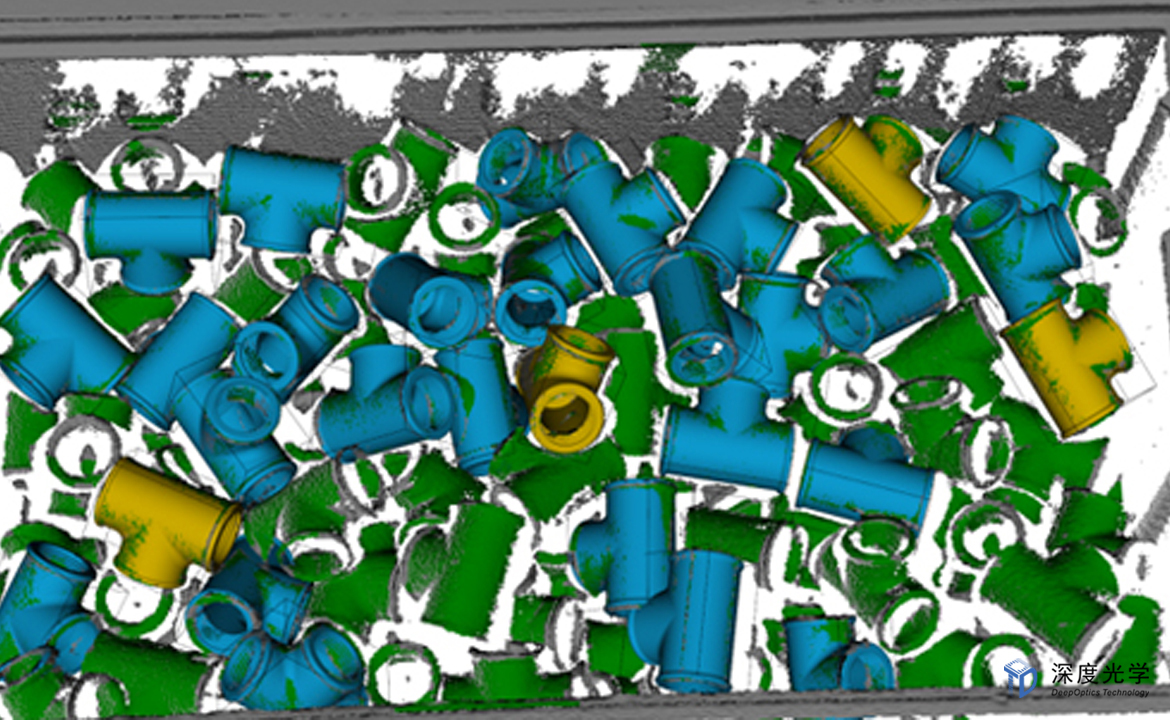
工业机器人和机器视觉之间的协作得以实现从无序到有序的跨越,在一个典型的无序抓取(Random Bin Picking, RBP)系统中,需要解决以下问题:
1.获得质量上佳的图像数据,含三维点云和灰度信息(暂不考虑颜色信息)
2.识别目标并确定目标物体的姿态,获得抓取点的[X,Y,Z,Rx,Ry,Rz]信息
3.手眼标定,将视觉传感器获取的坐标信息统一到机器人坐标系下
4.轨迹规划,使得机器人抓取的路径避开障碍点(料框,立柱等)和自身的奇异点
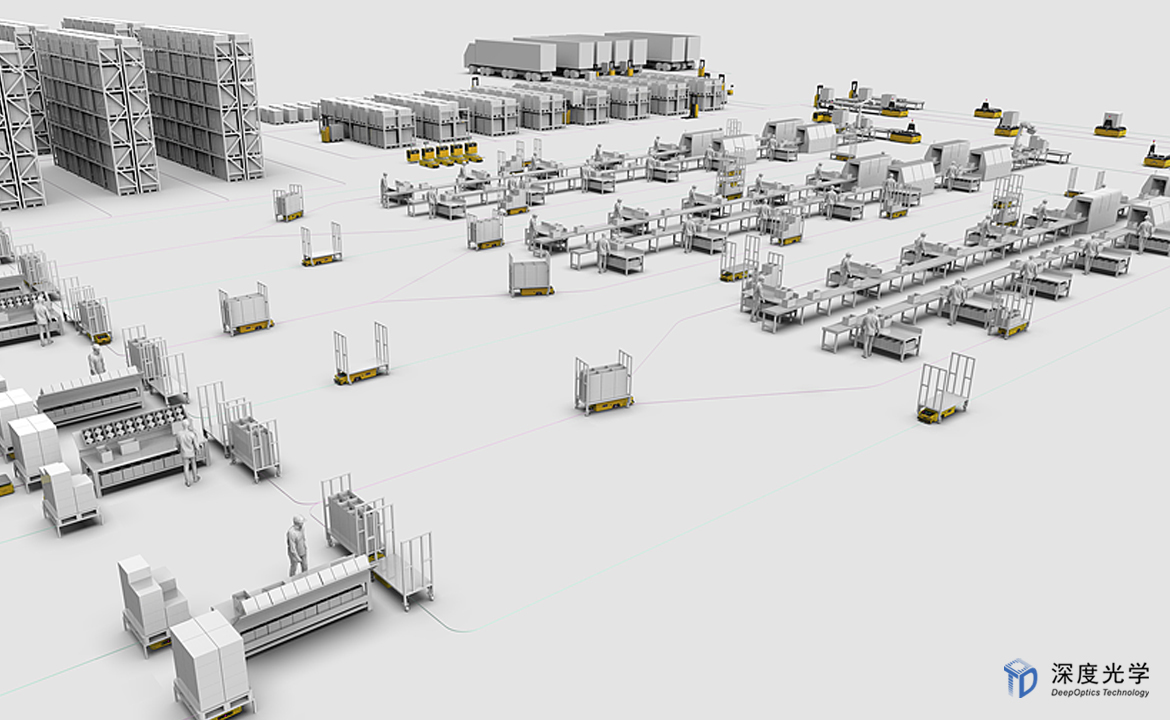

AGV运输
随着科学技术的日益发展和进步,AGV系统的技术已经融入了机器人和先进的传感器技术,使AGV更智能化。 现今国内外大型企业内部物流运输已逐步由人工搬运转化为自动传输。其中,非线体的柔性运输物流系统, 其首推方案就是AGV运输系统。AGV运输系统可以高效不间断的完成物料称重,物料取送、容器及料架回收 等一系列工作,更可以与工厂整体的生产管理系统进行信息交互,系统极富弹性和柔性。物料的装卸搬运是物流过程中发生频率高,耗用时间长,所需费用及反复作业量大的作业活动。为了降低成本并提高效 率,自动搬运技术的实施势在必行,因此受到越来越多的关注。
CONTACT US
联系我们
- 022-87459086 13263828688
- 天津市华苑鑫茂科技园军民园
- louis.liu@deepoptics.net
Trusted Optics R&D Service Provider!